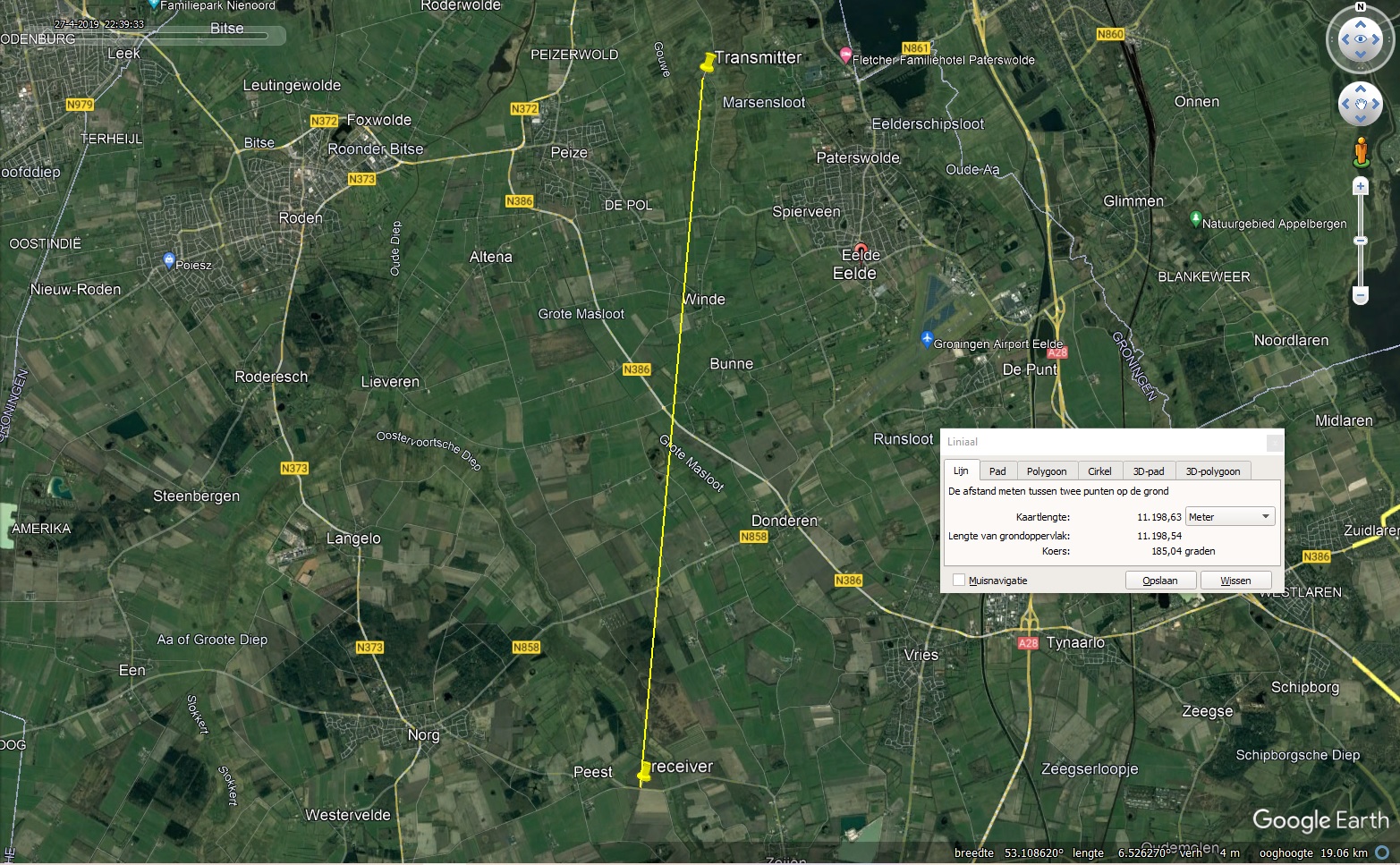
Transmitter was mounted on top of observation tower (26 meters). Receiver equipped with yagi antenna successfully received all packages at ground level at 11.2km distance!
Transmitter was mounted on top of observation tower (26 meters). Receiver equipped with yagi antenna successfully received all packages at ground level at 11.2km distance!
As there are more modern options to reliably transmit data to a ground station, I decided to switch from Talky to a HopeRF RFM98PW Lora module. This module is max 1 watt and can be easily implemented using the Arduino Radiohead library.
In addition, the trusted Atmega 328P has been replaced by the faster SAMD21G MCU with more memory and an embedded USB port/
Barometric pressure is measured using a MS5611 unit
Finally, the quectel L96 GPS unit has been replaced by a Ublox neo-9. This unit has better dynamic properties and allows for a maximum altitude of 80kms.

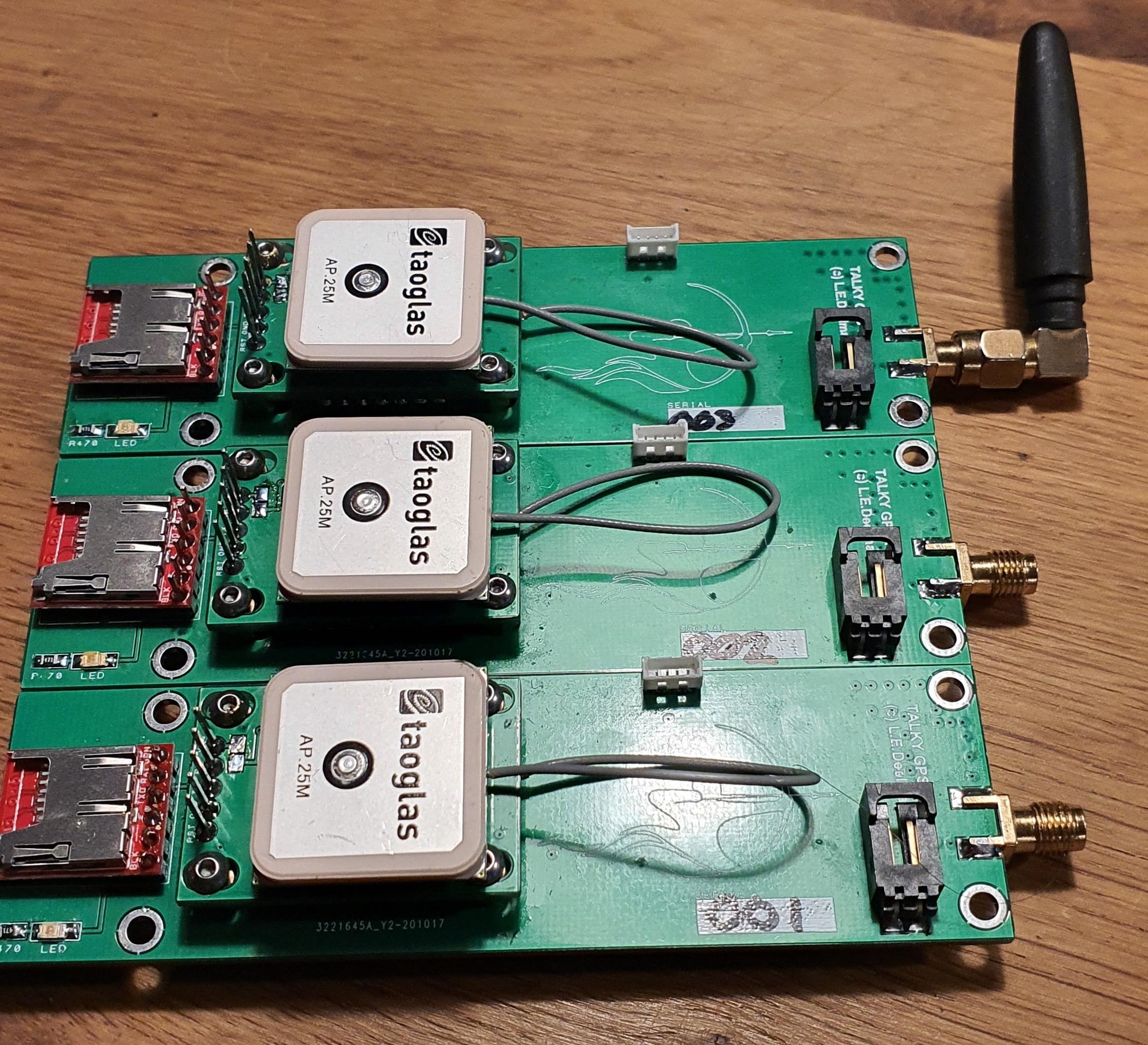
Latest Talky version (3.0). First series of 3 units using low voltage (1S lipo). GPS piggy-back board is now equiped with a Quectel L96 unit in balloon mode. Factory specs indicate a maximum altitude of 80km, but GPS spoofing experiments suggest maximum altitude of approximately 120km and a max speed of 2000m/s.
Prior to the anticipated launch in October we performed a full assembly of the Boostar- Giga stack. The test session did not reveal any ´surprises´ and total assembly took less than an hour.
Update (9 Oct 2020): Due to corona related travel restrictions we decided to postpone our launch until spring 2021.

The Inholland Aquilo team launched their Aquilo 6 rocket on September 18, 2020. This launch was supported by me and the rest of the NERO team.
The Boostar two solid APCP rocket motor was successfully tested on the 4th of May 2020. The motor produced a thrust up to 7500N with an overall performance of 43kNs.
Motor diameter 130mm, 1880mm length, 19.1kg propellant, overall weight 34.8kg, 30g silicone/15g thermite igniter
20+ kgs of propellant was mixed in a A200 Hobart mixer in two batches of 10 kgs.
Degassing of the mixture using a high vacuum
For casting of the propellant, a modified hobart mixer bowl was used with a plugable opening in the bottom. This allows for a mess-free filling of the casting tube.
After curing for several days, the lower plug of the casting tube was removed to reveal the nice star shaped XPS core supported by a 30mm aluminium rod.

Subsequently, the propellant was glued into the 130×5 casing using HTPB to avoid any air between liner and casing.

After curing of the HTPB for several days, the XPS core will be dissolved by a mixture of acetone and xylol.
Graphite nozzle and retainer for new booster



JvdB’s intimidator 5 rocket was launched at the ASK to test new electronics.
On April 27th 2019, we launched the two stage Boostar-one / GIGA III rocket. For a full launch report, please visit JvbB site at: https://www.verticallimits.nl/?page_id=6386
